Articles avec le tag ‘horizon artificiel’
Bonjour à tous
Airduino 4.3″ Pigue Edition low cost
This version was a special request designed for Experimental aircrafts.
It is a total redesign of the Airduino hardware and software. Typical use is for ultra light or experimental aircraft or renovation of cockpit instrumentation. And « Pigue », Argentina, is the city where it will first fly.

Includes the following features:
- * Sun readable display : Similar to the original Airduino, we have re-used the New Haven Display 4.3″ high brightness. It has a width of 100 x 55 mm which is just enough for narrow cockpits.
- * Slim design. Due to a redesign of the motherboard and circuits, the total thickness of the unit is only 40 mm.
Therefore it is possible to install the unit on the front face of the instrument panel without major hole or redesign of the board. All components are included on the circuit except an external AHRS. - * Presents: Airspeed, Attitude (Pitch/Roll), Magnetic heading, Altitude, Vertical Speed.
- * Symbols and readability have been improved. Bigger fonts are used. Only most important information are presented. Designed for simplicity & reliability.
- * AHRS : Inertial information and magnetic heading are provided from a remote sensor which is part of the kit. It is designed by »YostLab ».
- * Use of a Pressure sensor, more accurate for Airspeed indication
- * User interface: Only one knob used to interface easily all menus and functions.
- * Colour LED for Fault and abnormal indications
- * Weight : 300 grams+100 grams for the sensor
- * Power supply 12V ; and only 2.5W power consumption
View of the Electronics: Designed to be more compact.

Back connector for AHRS.

AHRS (Attitude and Heading Reference System) This is the « 3space nano from Yost Labs. It has to be installed at a remote loction, isolated from any magnetic interference.

At Power up, and in case of any anomalies, Red Flags are presented to show if an abnormal condition occurs.

The menus includes adjustment of Speed Flags.
This enables to customize the instrument for any particular Aircraft.

The Calibration menu is there for adjustment of any offset angle. Reset of the AHRS also possible there.

Two Altitude Alerts are provided (Below and Above). There is also an Altitude alert at 12000 ft for Oxygen.

The full Equipment will soon be available as a pre-assembled kit. Target price is 400 Euros.
This will comprise :
– All printed circuit boards with all components soldered and verified. Software installed.
– Original New haven display 4.3″
– 3 space nano sensor calibrated
– Unit in operational order
– A 3d Printed box for installation. Printed in PETG for better mechanical and thermal resistance.
Un exemple de réalisation de notre ami Beckers Francis sur un dessin d’un Gyro Magni en 3D






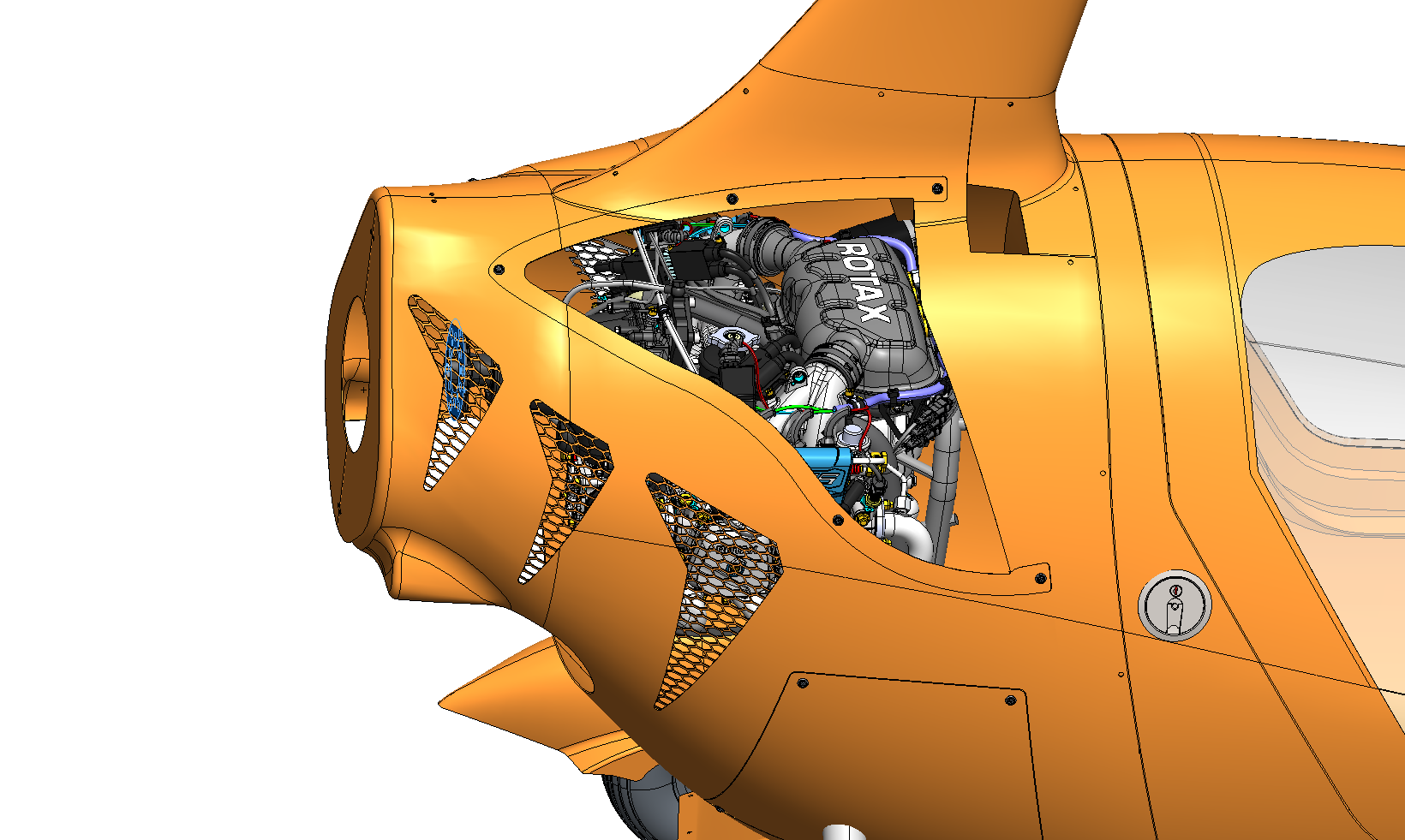





Voyez les détails de cette réalisation, à méditer…
Voici l’apparence de l’Airduino 4.3″ low cost.
 Page principale EFIS de l’Arduino 4.3″
Page principale EFIS de l’Arduino 4.3″
 Page des différents menus de l’Arduino 4.3″
Page des différents menus de l’Arduino 4.3″
 Page des Altitudes Alert
Page des Altitudes Alert
Des nouvelles prochainement
Quelques cartes mères utilises avec ce projet
WAFER-C400EV V1.0 IEI 3.5″

Disque SSD d’interface mSATA 256GB 32GB qui est largement suffisant

Mini PC Qotom Intel Celeron 1037U Dual Core qui supporte tous les types de Windows et Linux

Quelques vues de l’ensemble Airduino 4.3″ low cost et AHRS

Le AHRS dans sa boite finale

Airduino 4.3″ avec le AHRS (Retiré du projet)

Le AHRS 3-Space Nano de Yost Labs dans sa boite (Retiré du projet)

AIRDUINO 4.3″ Open Source low cost
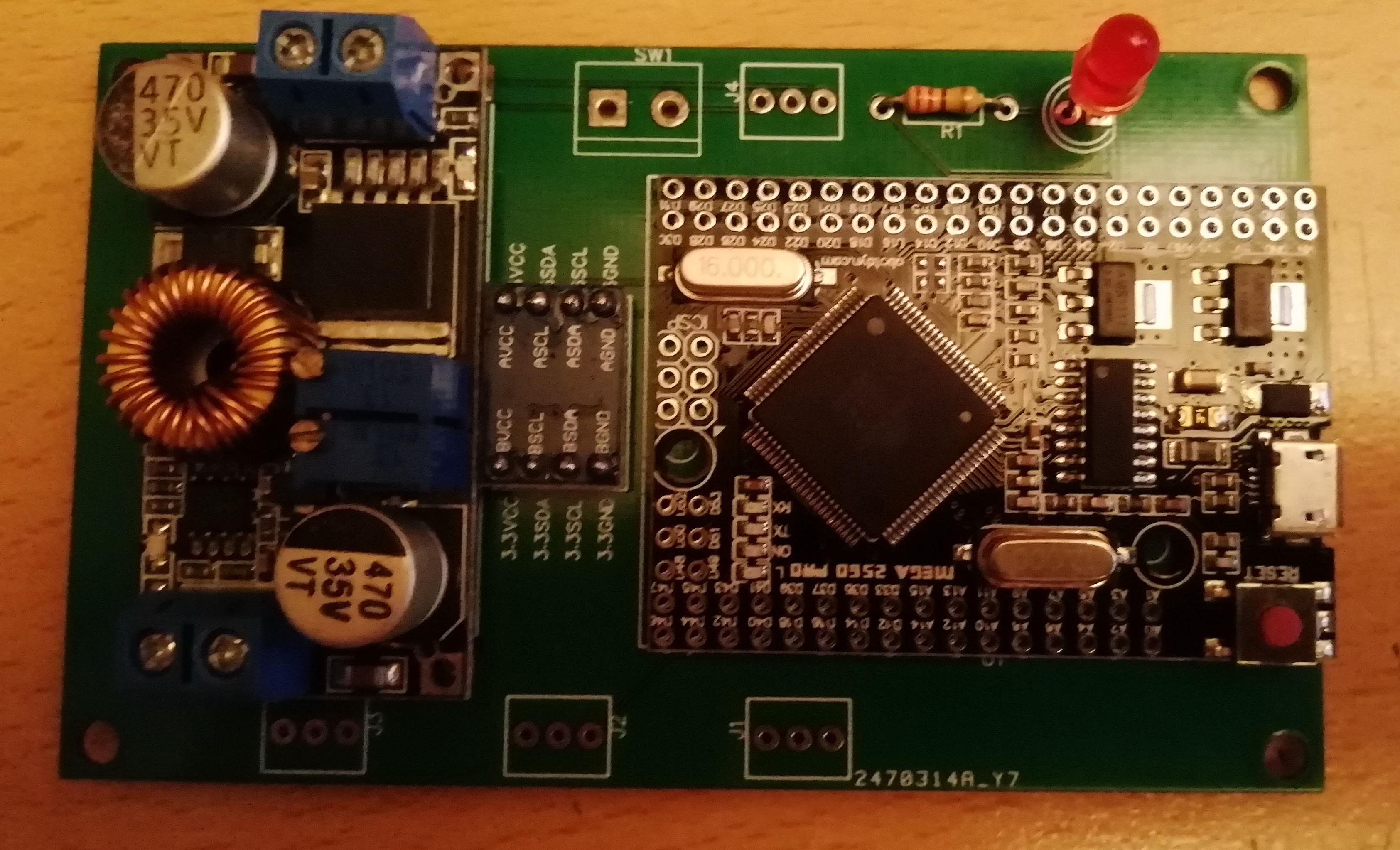
 Cet EFIS est construit autour d’un Arduino Mega 2560 pour la partie code, d’un ecran haut de gamme Newhaven 4.3’’ FT 800, de deux capteurs de pression BMP280 pour la vitesse, l’altimètre et le variométre et de l’AHRS de la société Levil Aviation modèle AHRS G-micro SW ou AHRS G-micro AW beaucoup plus complet qui remplace tous les capteurs AHRS bon marché qui ne fonctionnent pas en vol réel et qui restent bon juste pour des simulateurs de vol.
Cet EFIS est construit autour d’un Arduino Mega 2560 pour la partie code, d’un ecran haut de gamme Newhaven 4.3’’ FT 800, de deux capteurs de pression BMP280 pour la vitesse, l’altimètre et le variométre et de l’AHRS de la société Levil Aviation modèle AHRS G-micro SW ou AHRS G-micro AW beaucoup plus complet qui remplace tous les capteurs AHRS bon marché qui ne fonctionnent pas en vol réel et qui restent bon juste pour des simulateurs de vol.
Cet EFIS est entièrement paramétrable via le bouton du rotary encoder, vitesse en KTS, MPH et Km/h, altitude en m ou en Ft, pression en inHg, mmHg ou hPa, Vitesses pour les arcs de couleurs (VNE, VFE, VNO) réglables par l’utilisateur, 5 altitudes d’alerte, informations GPS pour la vitesse sol et le cap, mise a zéro du capteur AHRS par défaut y compris la pression standard 1013.25 hPa, Pitch et Roll réglables, Bug pour le Cap magnétique, reglage du Cap magnétique, luminosité réglable, température extérieure en °C ou °F suivant le mode choisi.
En ce qui concerne les couleurs des différentes vitesses et autres paramètres pour le moment il faut les paramétrer dans le code, plus tard je mettrais toutes ces variables en mémoire avec un menu dédié pour plus de commodité a l’utilisation.
A noter que j’ai abandonné l’idée avec le capteur Yost Labs 3-Space Nano ou le BNO 055 qui ne sont pas des AHRS aviation, donc j’ai du me faire une raison et changer complétement avec des AHRS aviation professionnels.
J’ai fait pas mal de recherches sur le net et je suis tombé sur des AHRS pas tous aéronautiques allant de $800,00 a $3000,00 et plus, ce qui évidement est très onéreux pour mon projet.
L’écran est également un haut de gamme donc lui aussi un peu plus onéreux qu’un écran normal.
Le boitier à été réalisé avec une imprimante 3D (Alfawise U20 en ce qui me concerne), actuellement cet EFIS est en phase de test est d’un changement graphique notamment sur le bandeau de la vitesse, il est prometteur.
Vous pouvez télécharger la version Airduino Open Source de Don Morris Airduino ici.
A noter qu’une version commerciale de cet EFIS est en cours d’élaboration avec la participation de notre ami François Sahuc qui s’occupe du design plus détaillé et de l’ami Francis Beckers pour la partie 3D….
Composition de cet EFIS avec les différentes parties du boitier crée avec une imprimante 3D

Un nouveau AHRS de qualité supérieur au BNO 055, le 3-Space Nano (Retiré du projet)
 La taille du 3-Space Nano de Yost Labs est de 16mm x 16mm (Retiré du projet)
La taille du 3-Space Nano de Yost Labs est de 16mm x 16mm (Retiré du projet)
LISTE DES TELECHARGEMENTS DES CODES ARDUINO GRATUITS
 Page en construction
Page en construction
Quelques photos du Mini EFIS v3 dans sa boite d’essai.











En prévision:
Je vais adapter la version 2.0 d’Oleg qui fonctionne en connexion CAN BUS avec le TFT de 7″ 800 x 480 et 1000 nit.
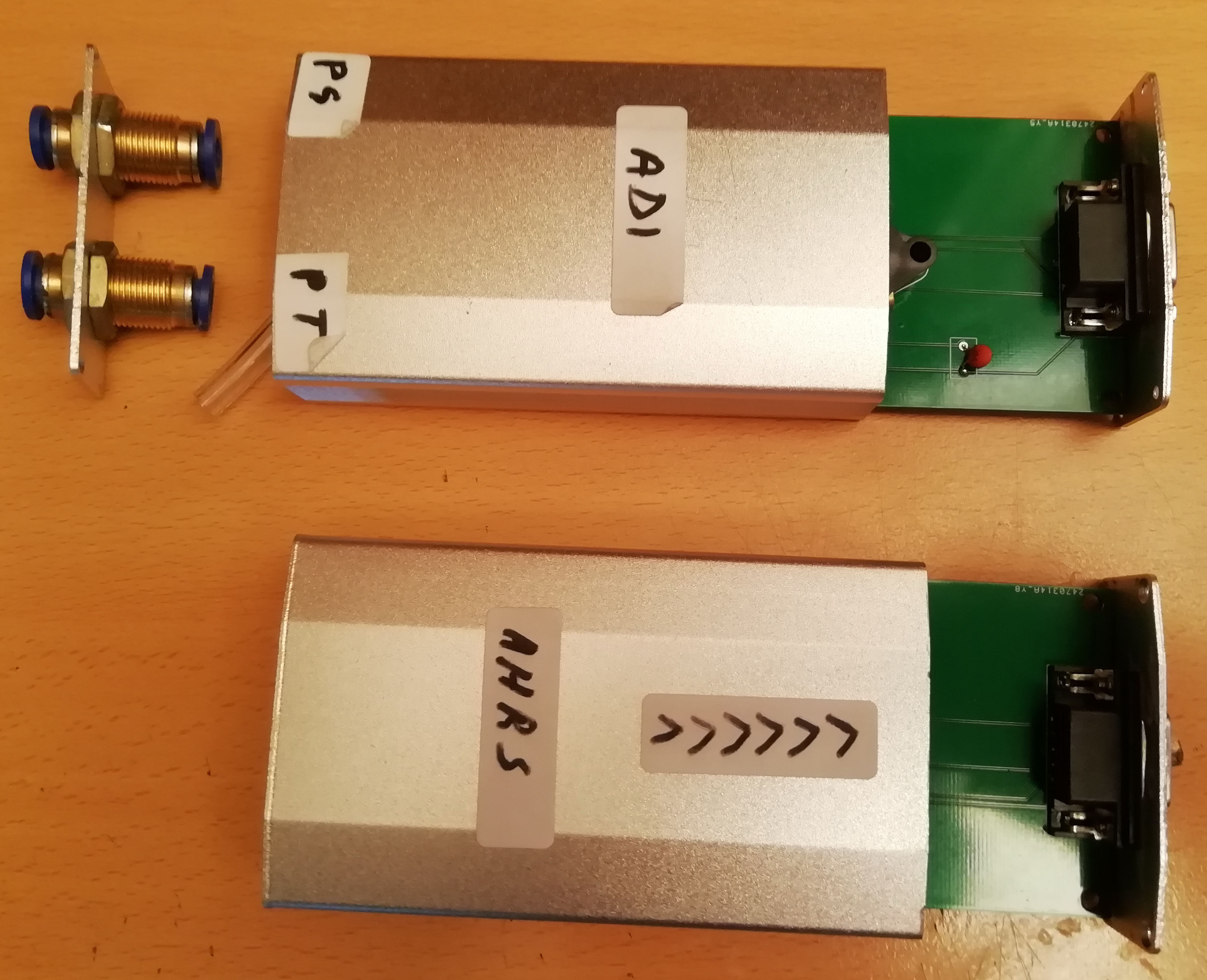
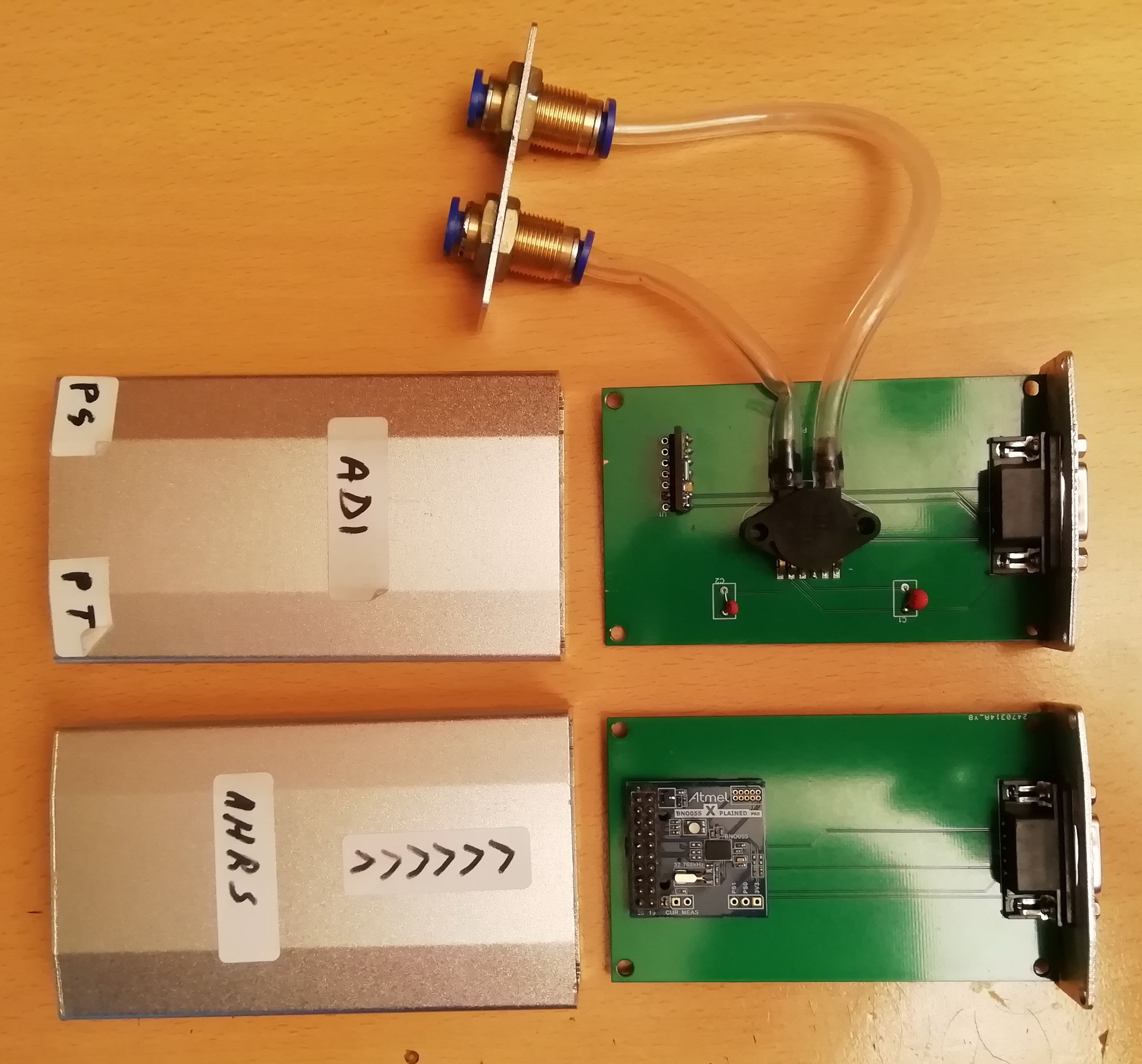
J’ai réalisé une nouvelle conception des différents boitiers pour AHRS et ADI, quand au boitier de l’EFIS v3 est en cours de conception avec mon imprimante 3D que j’ai acheté a cet effet, voici les boitiers AHRS et ADI avec la Carte Principale.
J’ai pu constater que la carte ADI doit être repensé et redessinée car j’ai fait une petite erreur qui est que la position du capteur de vitesse (MPX5010DP) est mal orienté et que cela implique que les tubes sont pliés, pas bon du tout, donc j’ai refait des nouvelles plaques.
Pour informations, le schéma et les circuits imprimés double faces ont étés réalisés a l’aide du logiciel EasyEDA spécialement conçu pour les Arduino et les différents capteurs, les circuits imprimés sous format Gerber issus de ce logiciel se téléchargent automatiquement sur le site JLCPCB qui réalise ces circuits imprimés a un niveau et qualité professionnelle avec un cout plutôt bas, il y a également un excellent site pour les circuits imprimés WELLPCB qui réalise aussi des circuits imprimés de qualité professionnelle a bas cout, dans certains cas le transport peut couter plus cher que les circuits imprimés !.
Logiciel réalisé avec Processing 3.3.6 en 32 bit pour une bonne fluidité d’exécution.
Le logiciel fonctionne avec tous les modelés de Raspberry Pi.
Ce mème logiciel est entièrement opérationnel avec un excellent résultat, mieux que la Raspberry Pi sur des cartes mère Pico ITX fonctionnant avec un bon vieux Windows XP avec un SSD 2Gb allégé (environ 100 mb une fois installé), ou Windows 7 car il n’est pas gourmand en ressources.
Pour le moment voici a quoi cela ressemble…



Présentation du Mini EFIS v3 avec Processing 3.3.6
Mini EFIS v3 LCD 7″ 1000 nits 800×480 crée avec Processing 3.3.6
Grace a l’aide de François Sahuc pour ce superbe design et mon ami Francis Beckers pour la partie imagerie et 3D, la dernière version du Mini EFIS v3 (version du logiciel arduino v7) crée avec Processing v3 est une vraie merveille, j’ai intégré quelques informations provenant d’un GPS (NEO-7M) que j’ai connecté a l’ensemble de cet EFIS qui donne la Latitude, Longitude, l’Altitude, la Ground Speed (GS) et la Course On Ground (COG), ajout des petites fenêtres de vitesse sur le ruban de la vitesse tout comme l’altimètre, ajout aussi d’un capteur de température extérieure (TMP 102), ajout des affichages de réglages suivants, réglage des différentes vitesses Vs, Vs0, VFE, VNO, VNE, VA, et *BGS pour dessiner et calibrer les bandes de couleurs des différentes vitesses associées, *AOS calibrage de Speed Offset du capteur MPXV5010DP (pour la vitesse), protection du réglage de l’altimètre compris entre 950 hPa et 1050 hPa avec affichage de l’altitude en rouge si on vole au dessus de 12.500 Ft pour rappeler au pilote qu’au delà il faut de l’oxygéne, ajout de différentes conversions d’unités de vitesse IAS et GPS en Km/h, MPH et KTS, l’AHRS utilisé est celui de la société Levil Aviation modèle AHRS G-micro SW ou AHRS G-micro AW beaucoup plus complet qui remplace tous les capteurs AHRS bon marché qui ne fonctionnent pas en vol réel et qui restent bon juste pour des simulateurs de vol, ajout du réglage du Pitch et du Roll pour régler le « zéro » de l’horizon artificiel, ajout du réglage de la vitesse IAS Mini pour avoir une bonne stabilité de l’indicateur de vitesse, le tout est sauvegardé en mémoire sur l’EEPROM de l’Arduino Mega 2560 qui est réglable grâce au Rotary Encoder tout comme la pression altimétrique connecté avec l’Arduino Mega 2560, le tout est fonctionnel.
*BGS = Best Glide Speed (Finesse max.)
*AOS = Airspeed OffSet (Réglage du capteur de vitesse autour du zéro).
Le boitier des différents capteurs appelé aussi ADAHRS (Air Data Attitude and Heading Reference System), est relié au boitier du Mini EFIS v7 via un câble DB9 qui sera placé de préférence entre les sièges et a l’arrière pour éviter toutes perturbations électroniques (bruit électronique) qui peut faire osciller et affoler la bille.
Mon choix a été de mettre un lcd de 1000 nits 800 x 480 pxl pour avoir une très bonne luminosité mème en plein soleil, chose faite, car pour rappel, un lcd normal a une luminosité ne dépassant pas les 350 nits.
Tout ce système fonctionne avec une carte Raspberry pi 2 B+ avec le système Linux (Raspbian).
Logiciel réalisé avec Processing 3.5.4 en 32 bit pour une bonne fluidité d’exécution.
Ce mème logiciel est entièrement opérationnel avec un excellent résultat, mieux que la Raspberry Pi sur des cartes mère Pico ITX fonctionnant avec un bon vieux Windows XP avec disque SSD 2Gb allégé (environ 100 mb une fois installé), ou Windows 7 car il n’est pas gourmand en ressources.
Le logiciel fonctionne avec tous les modelés de Raspberry Pi.
 Cliquer sur l’image pour agrandir
Cliquer sur l’image pour agrandir

Par la suite une nouvelle fonction sera intégrée au Mini EFIS v3 avec GPS qui donnera la Direction et la Vitesse du vent en temps réel pendant le vol.
Je me suis servi de la formule assez complexe qui explique Ed Williams dans Aviation Formulary v1.47 pour intégrer le calcul fait par un arduino Nano pour connaitre la Direction et la Vitesse du vent, j’avoue que cela à été très laborieux pour moi de ré-écrire pour adapter cette formule dans le langage arduino et sur le logiciel Aerocalc.