Â
Ce logiciel pour une partie est Ă©crit avec Arduino IDE et il a Ă©tĂ© Ă©crit pour une carte ESP32 pour commander un Rotary Encoder (KY-040) pour aller dans les diffĂ©rents menus du Mini EFIS 7.0″, il reçoit Ă©galement les donnĂ©es provenant du AHRS GEN2 ou GEN3 (a venir) pour avoir le pitch, le roll, la bille, la vitesse (IAS), l’altimètre, le variomĂ©tre et le G-mĂ©tre, il reçoit Ă©galement le cap magnĂ©tique provenant du compas magnĂ©tique SEC295.
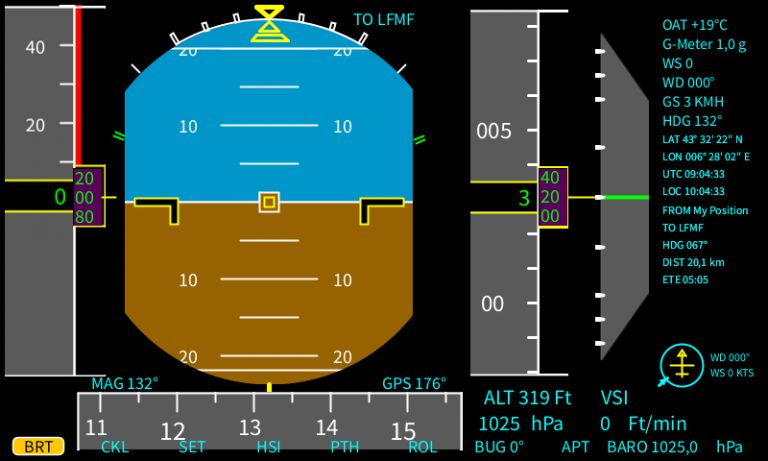
Le logiciel graphique pour le Mini EFIS 7.0″ est Ă©crit en Processing 5.4.1 et il est installĂ© sur une carte Raspberry Pi 4 ou 5 avec un système d’exploitation Linux qui rĂ©cupère toutes ces informations pour affichage sur un Ă©cran NHD-7.0-HDMI-N-RSXP 800×480 pxl 1000 nit HDMI pour une bonne lisibilitĂ© avec le soleil, le Raspberry Pi 4 ou 5 reçoit Ă©galement via un port USB dĂ©diĂ© un GPS GNSS type BN-880 ou autre pour avoir les autres informations de position, vitesse, cap, distance ainsi que la Direction du vent (WD) et la Vitesse du vent (WS) en vol et en temps rĂ©el.
Â
Menu:
BRT pour le réglage de la luminosité
CKL pour afficher et suivre la Check-List
SET pour le rĂ©glages de diffĂ©rentes vitesses (VE, VNO, VNE etc…)
HSI affiche un HSI (Horizontal Situation Indicator)
PTH pour réglage du pitch
ROL pour réglage du roll
BUG pour régler le cap magnétique ou COG a suivre
APT pour chercher et afficher les aéroports, aérodromes et terrains ulm
BARO pour régler la pression atmosphérique
Réglage des unités en hPa, inHg et mmHg
Â